Simulation#
The simulator allows to observe the behavior of the system under a given policy.
The following policies are provided:
[1]:
import stochastic_matching as sm
sm.common.get_classes(sm.Simulator)
[1]:
{'fcfm': stochastic_matching.simulator.fcfm.FCFM,
'priority': stochastic_matching.simulator.priority.Priority,
'random_edge': stochastic_matching.simulator.random_edge.RandomEdge,
'random_item': stochastic_matching.simulator.random_item.RandomItem,
'e_filtering': stochastic_matching.simulator.e_filtering.EFiltering,
'constant_regret': stochastic_matching.simulator.constant_regret.ConstantRegret,
'longest': stochastic_matching.simulator.longest.Longest,
'virtual_queue': stochastic_matching.simulator.virtual_queue.VirtualQueue}
Tadpole#
Bijective#
Consider the following tadpole:
[2]:
from stochastic_matching.display import VIS_OPTIONS
VIS_OPTIONS["height"] = 300
tadpole = sm.Tadpole(m=5, n=3, rates="uniform")
tadpole.show_graph()
This tadpole is not stabilizable: it is bijective and its unique solution has null edges.
[3]:
tadpole.show_flow()
As a consequence, the system is unstable.
[4]:
tadpole.run("fcfm", n_steps=10000000)
[4]:
False
The simulator finished before the end (due to queue overflow).
[5]:
tadpole.simulator.logs.steps_done
[5]:
1067814
[6]:
tadpole.show_flow()
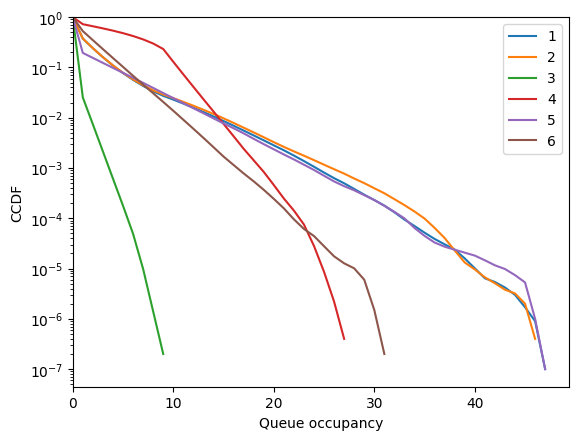
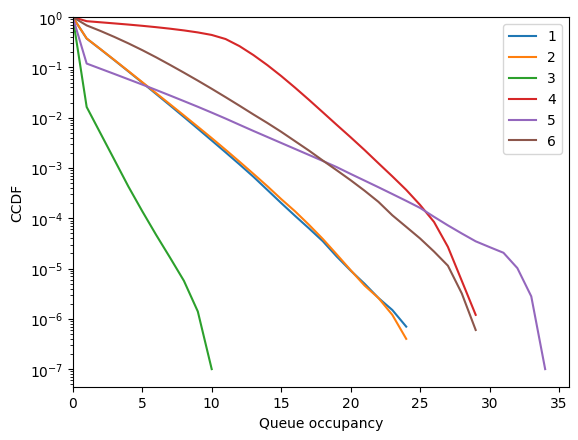
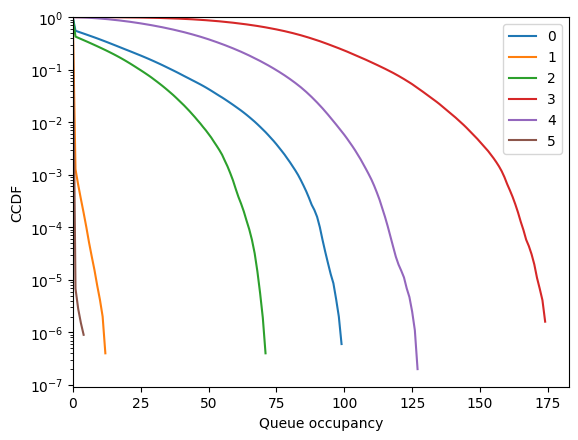
We can look the CCDFs of the run to see what went wrong:
[7]:
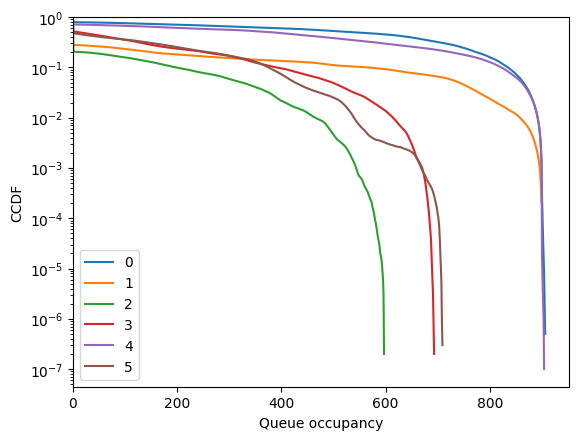
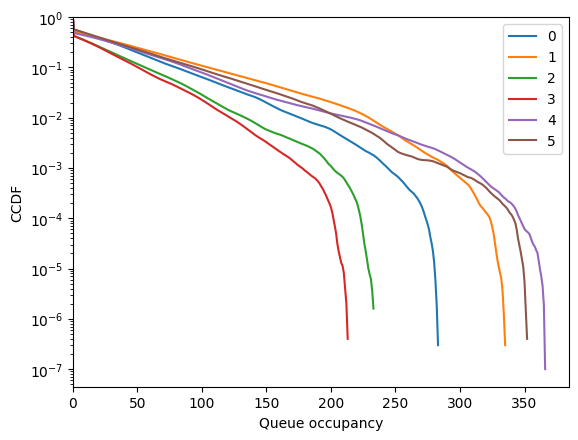
fig = tadpole.simulator.show_ccdf(sort=True)
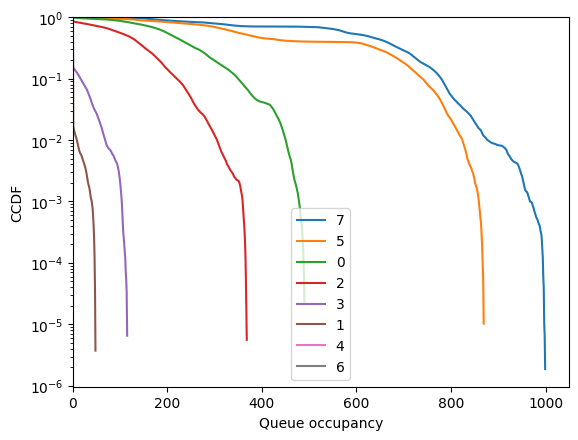
Node 7 overflowed, while node 5 was not in a good shape either.
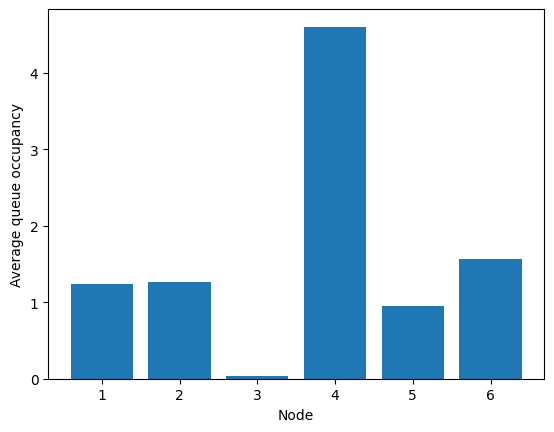
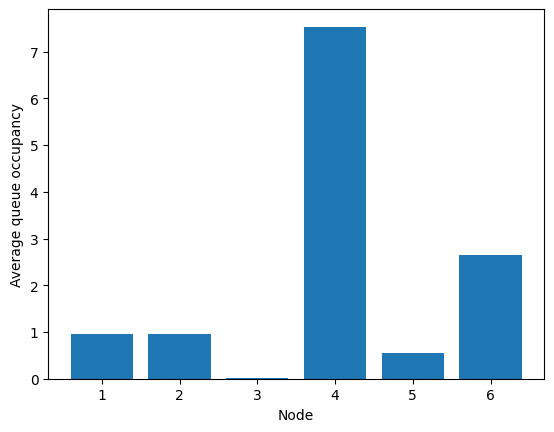
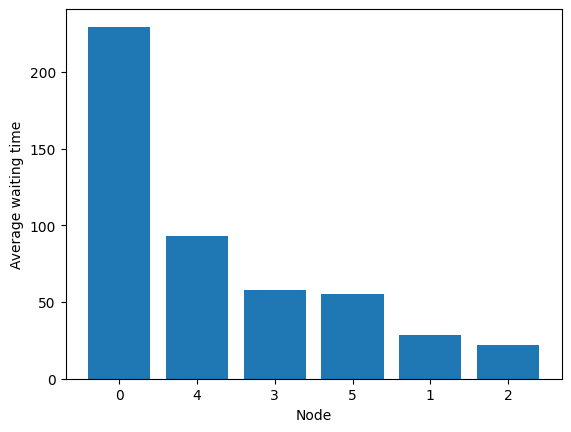
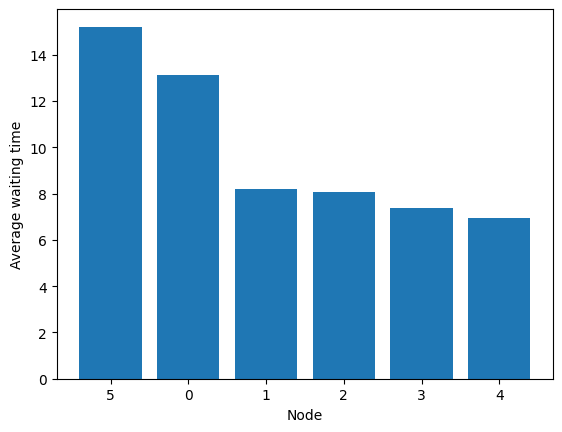
This can also be showed with average queue sizes:
[8]:
fig = tadpole.simulator.show_average_queues(sort=True)
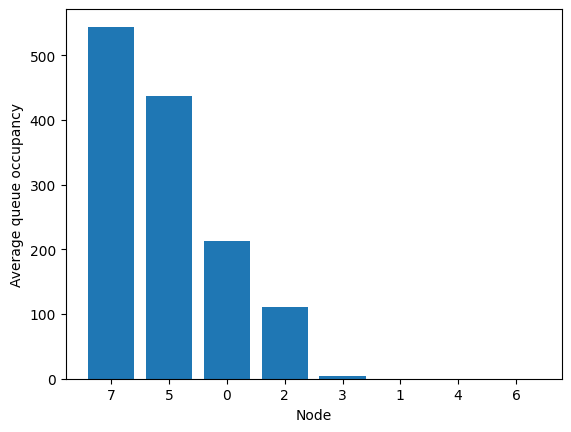
Let’s change the arrival rates to have something nicer.
[9]:
tadpole.rates = [1, 1, 1, 1, 2, 2, 2, 1]
We can see that it works!
[10]:
tadpole.run("fcfm", n_steps=10000000)
[10]:
True
[11]:
tadpole.show_flow()
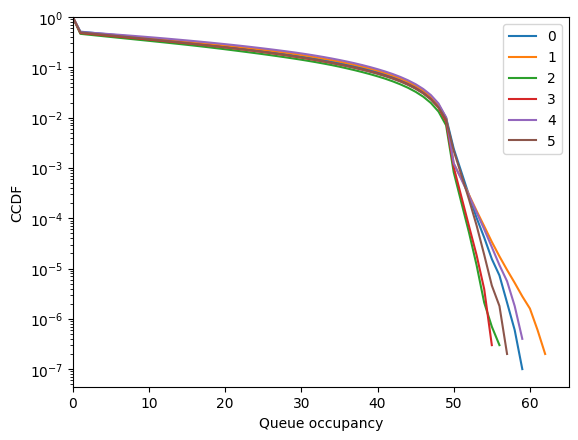
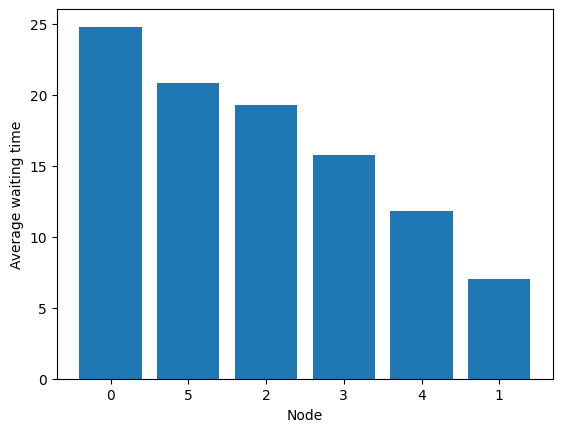
We can see that the queues are much more tight!
[12]:
fig = tadpole.simulator.show_average_queues(sort=True)
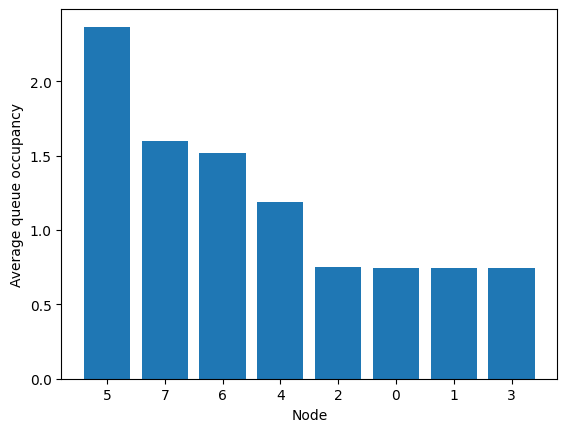
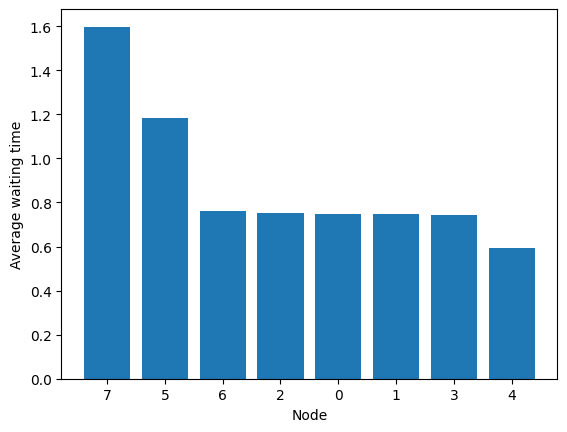
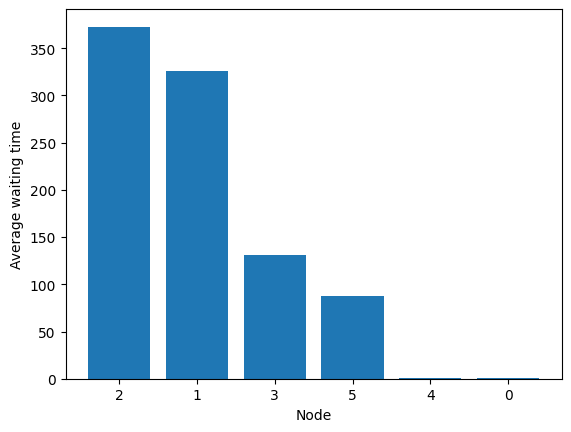
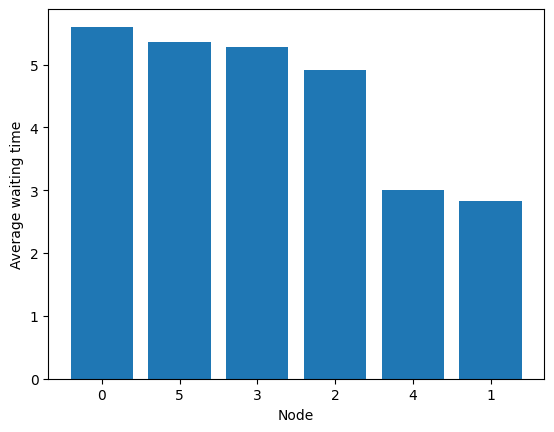
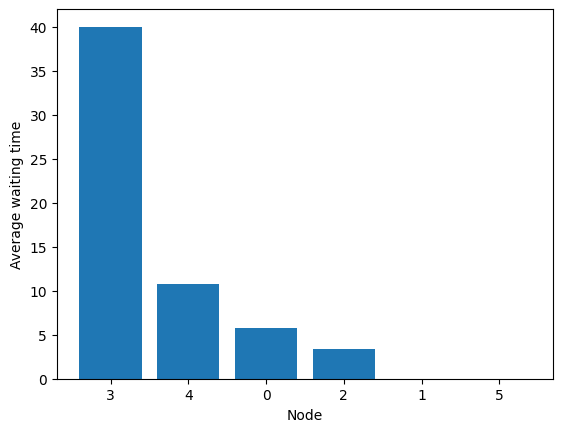
Note that the average queue can be converted in an average waiting time (using Little’s Law for each node queue).
[13]:
fig = tadpole.simulator.show_average_queues(sort=True, as_time=True)
Nonjective#
Consider the following tadpole:
[14]:
tadpole = sm.Tadpole(rates="uniform", m=4)
It is bipartite and does not verify the stability condition NCond (even bipartite NCond), so all solution break the conservation law.
Simulation fails:
[15]:
tadpole.run("fcfm", n_steps=10000000, max_queue=100000)
[15]:
False
[16]:
tadpole.show_flow()
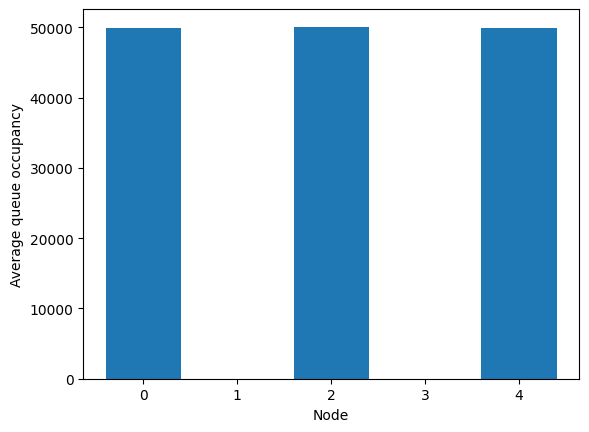
Nodes 0, 2, and 4 are in limbo.
[17]:
fig = tadpole.simulator.show_average_queues()
Let’s change the arrival rates to have bipartite NCond (which is not non-bipartite NCond).
[18]:
tadpole.rates = [1, 1, 1, 2, 1]
[19]:
tadpole.run("fcfm", n_steps=1000000)
[19]:
True
We can see that it works! FCFM seems to stabilizes even if NCond is not met.
[20]:
tadpole.show_flow()
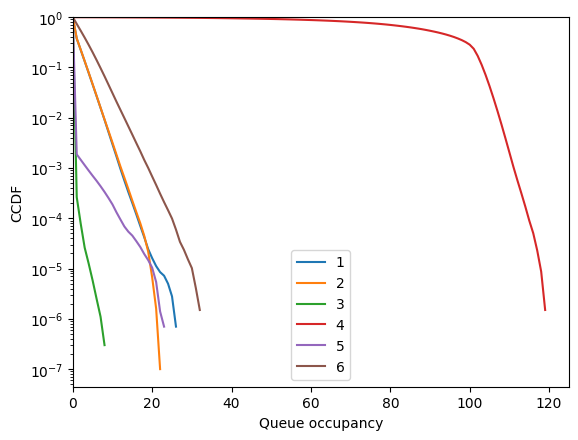
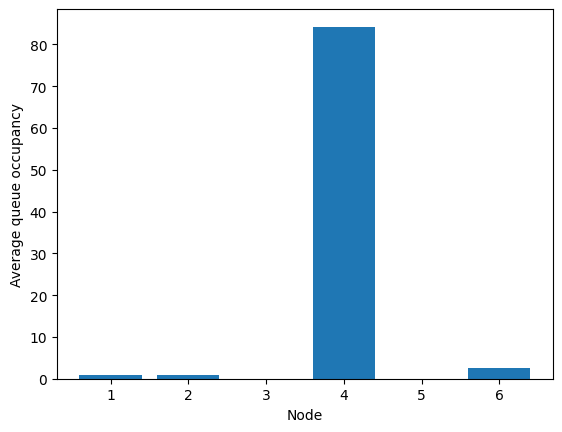
[21]:
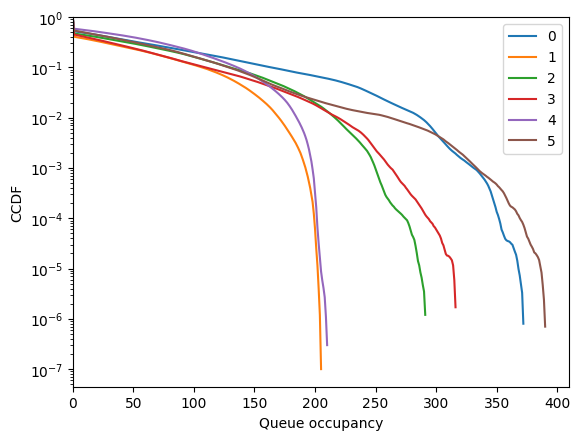
fig = tadpole.simulator.show_ccdf()
Hum, the queues are quite high. Maybe we didn’t wait long enough?
[22]:
tadpole.run("fcfm", n_steps=10000000, seed=42)
[22]:
False
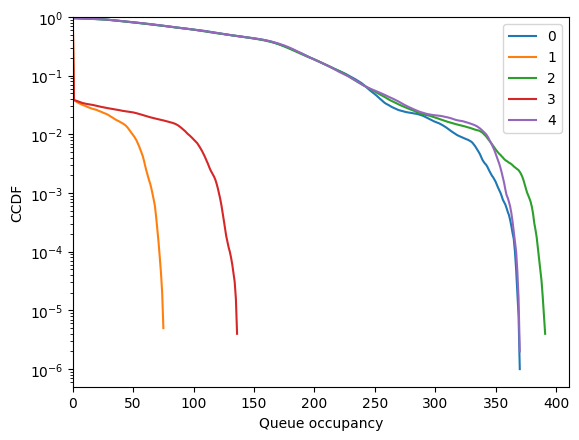
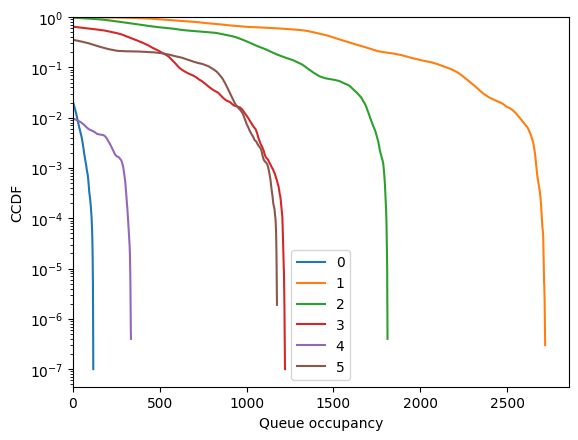
[23]:
fig = tadpole.simulator.show_ccdf()
Not so stable after all… This is not surprising because of the random walk between left and right nodes, which forces queues of arbitrary size if one waits long enough.
Diamond#
Consider the following:
[24]:
diamond = sm.CycleChain(tol=1e-3)
ϵ = 0.2
diamond.rates = [2, 2 + ϵ, 1 + ϵ, 1]
Try fcfm
[25]:
diamond.run("fcfm", n_steps=10000000)
[25]:
True
[26]:
diamond.show_flow()
Nodes 0 and 3 are non-empty most of the time.
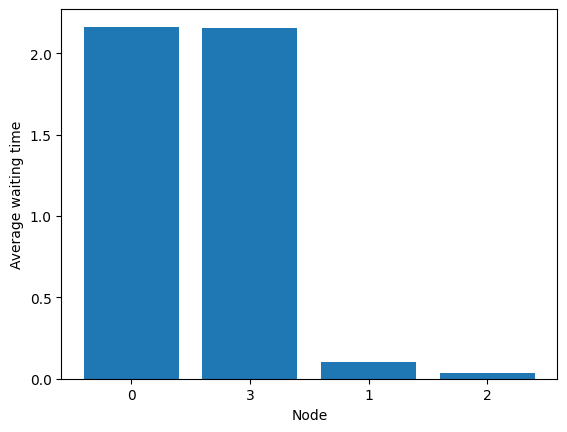
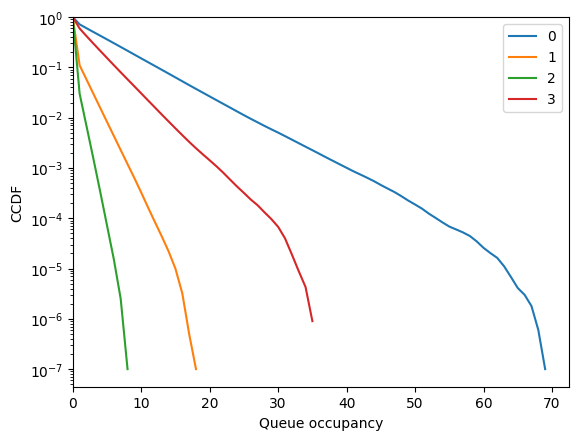
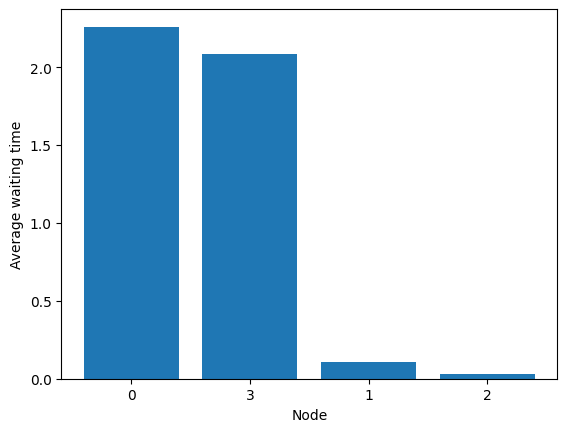
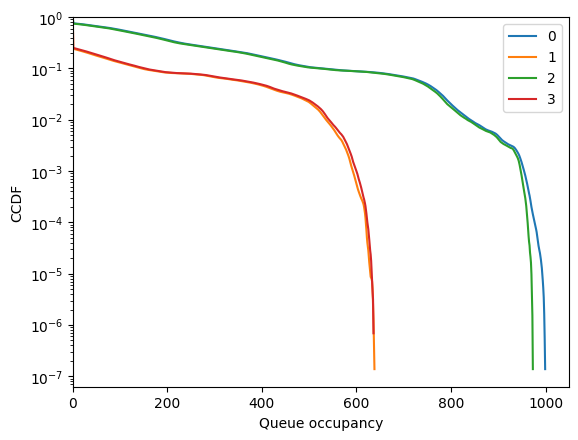
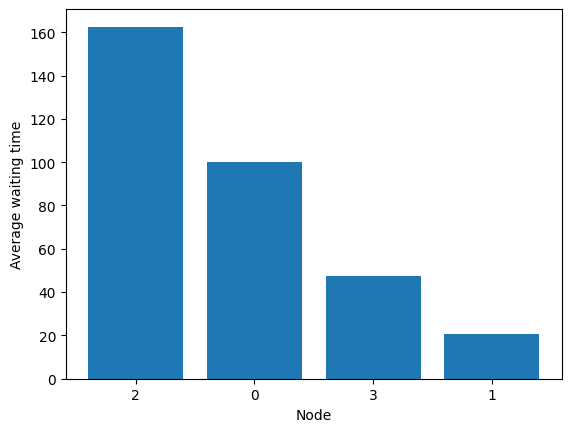
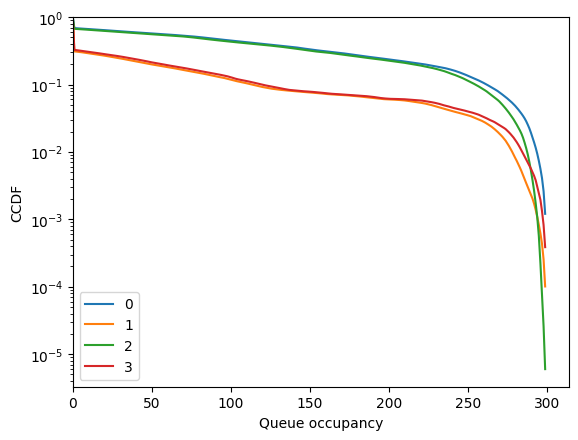
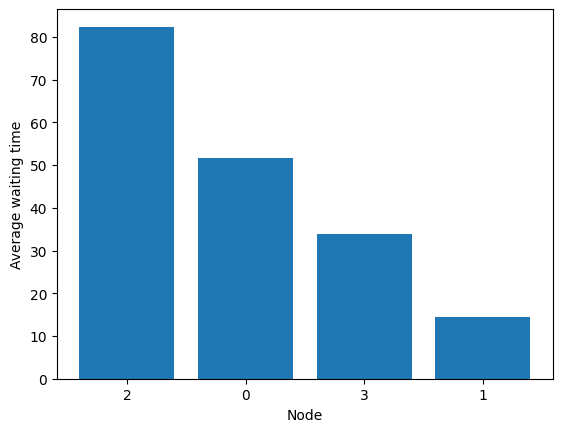
[27]:
fig = diamond.simulator.show_ccdf(sort=True)
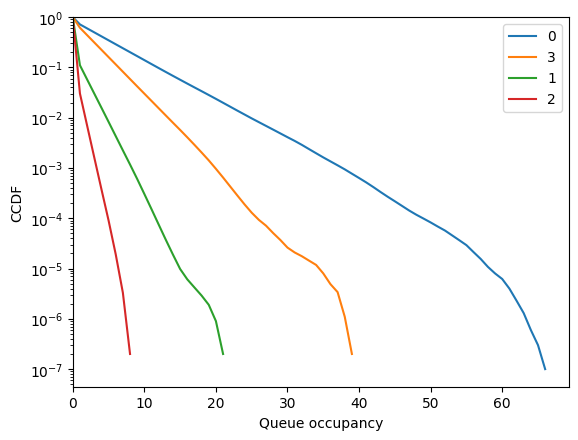
[28]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
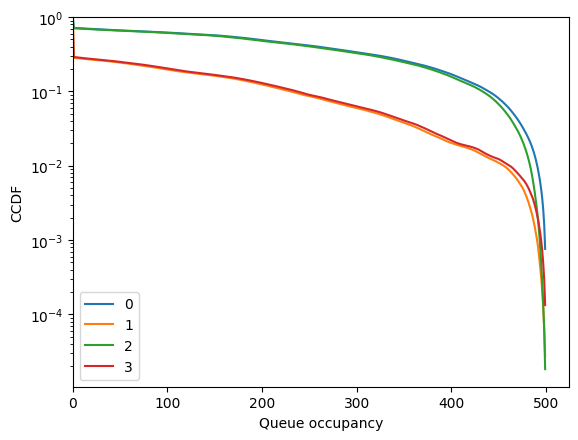
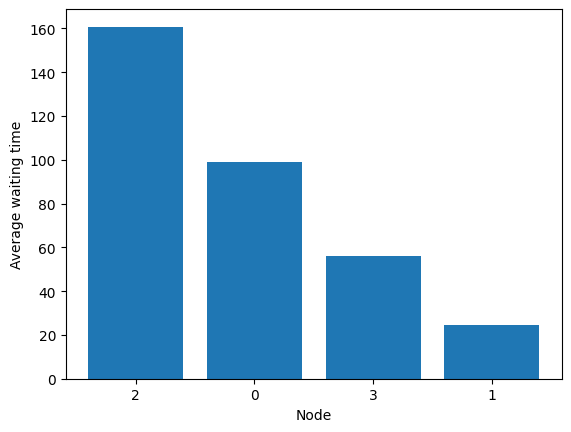
Try random edge (we use a seed to have a True result; in practice, random node is borderline in this example and overflows relatively often).
[29]:
diamond.run("random_edge", n_steps=10000000, seed=42)
[29]:
True
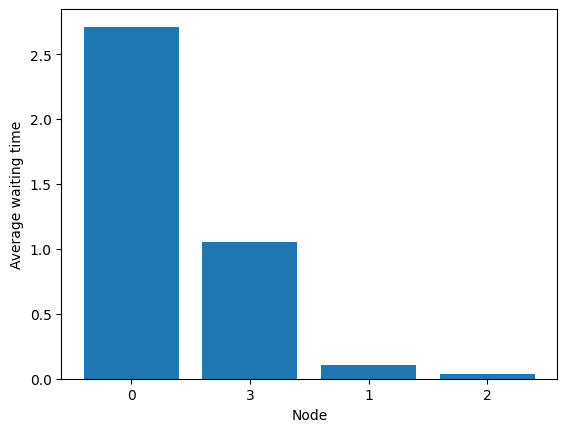
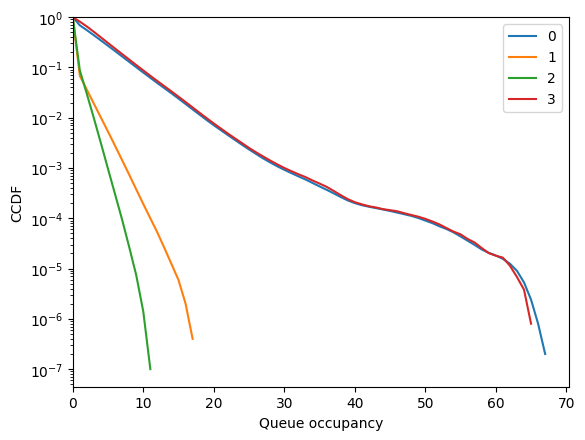
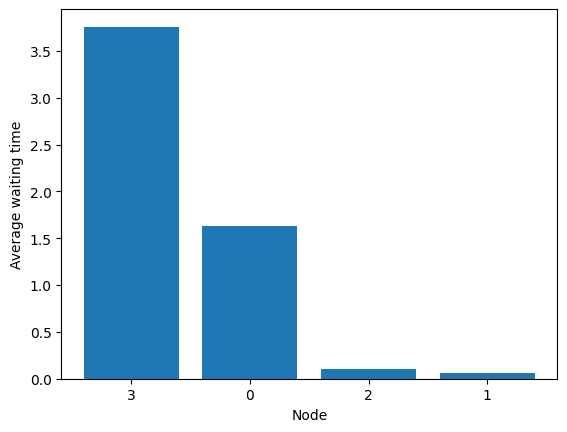
[30]:
diamond.show_flow()
[31]:
fig = diamond.simulator.show_ccdf()
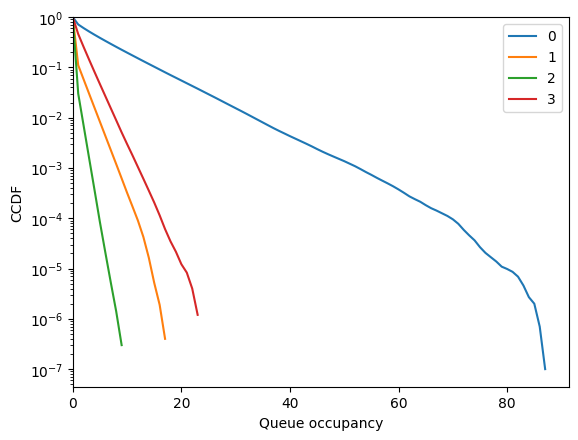
[32]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Try random item.
[33]:
diamond.run("random_item", n_steps=10000000)
[33]:
True
[34]:
diamond.show_flow()
[35]:
fig = diamond.simulator.show_ccdf()
[36]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Trying to reach an extreme feasible solution with a greedy policy#
Now we would like to have a greedy policy that tries to move on towards the extreme feasible solutions. Sadly, no such policy exists (cf https://hal.archives-ouvertes.fr/hal-03502084).
Yet, we can try to approach them with priority-based greedy selection. First, look at the extreme points (vertices).
[37]:
diamond = sm.CycleChain(rates=[2, 2.2, 1.2, 1])
for i in range(len(diamond.vertices)):
diamond.show_vertex(i)
We can see that the first vertex prioritizes edges 1 and 3, while the second one prioritizes edges 0 and 4. Let us see what happens if one uses these priorities in a greedy policy.
[38]:
diamond.run("priority", weights=[0, 1, 0, 1, 0], n_steps=10000000)
diamond.show_flow()
[39]:
diamond.run("priority", weights=[1, 0, 0, 0, 1], n_steps=10000000)
diamond.show_flow()
Not bad, but not perfect. To reach a vertex, we may need to use a filtering policy.
Trying to reach an extreme feasible solution with a filtering policy#
[40]:
diamond.vertices
[40]:
[{'kernel_coordinates': array([-0.25]),
'edge_coordinates': array([1. , 1. , 0.2, 1. , 0. ]),
'null_edges': [4],
'bijective': True},
{'kernel_coordinates': array([0.75]),
'edge_coordinates': array([2. , 0. , 0.2, 0. , 1. ]),
'null_edges': [1, 3],
'bijective': False}]
The first kernel is bijective, we just need to forbid the null edge.
[41]:
diamond.run(
"longest", forbidden_edges=diamond.vertices[0]["null_edges"], n_steps=10000000
)
[41]:
True
[42]:
diamond.show_flow()
We can check that the matching rate on edge 4 is 0.
[43]:
diamond.simulation
[43]:
array([1.00047808, 0.99915264, 0.20158848, 0.99878016, 0. ])
No noticeable impact on the performance.
[44]:
fig = diamond.simulator.show_ccdf()
[45]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Now we try on the second kernel.
[46]:
diamond.run(
"longest", forbidden_edges=diamond.vertices[1]["null_edges"], n_steps=10000000
)
[46]:
False
[47]:
diamond.show_flow()
So this is unstable but the the matching rate on edges 1 and 3 is 0.
[48]:
diamond.simulation
[48]:
array([1.99957622, 0. , 0.20045326, 0. , 0.99910573])
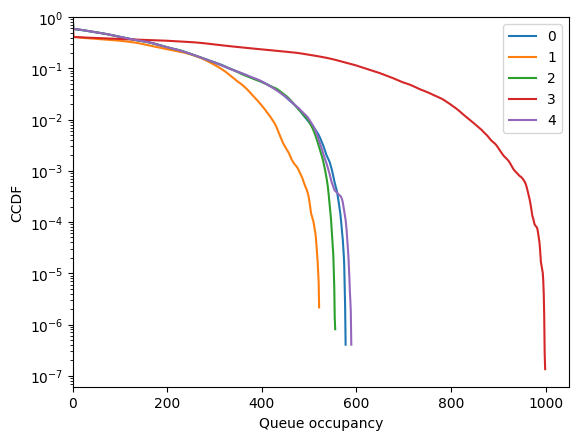
Performance is bad, as the vertex is injective-only (bipartite).
[49]:
fig = diamond.simulator.show_ccdf()
[50]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Many solutions exist in that case. For example, use a k-filtering policy (i.e. with threshold).
[51]:
diamond.run(
"longest",
forbidden_edges=diamond.vertices[1]["null_edges"],
k=500,
n_steps=10000000,
)
[51]:
True
[52]:
diamond.show_flow()
So this is stable with a limited matching rate on edges 1 and 3.
[53]:
diamond.simulation
[53]:
array([1.9995712e+00, 1.5276800e-03, 1.9951488e-01, 1.9712000e-04,
9.9900160e-01])
Performance is controlled by the threshold.
[54]:
fig = diamond.simulator.show_ccdf()
[55]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Reward maximization variant#
In many use cases, one may want to optimize the flow based on some reward associated to each edge. It turns out that this equivalent to finding a subset of edges to forbid such that the flow(s) on that subgraph will maximize the reward. stochastic_matching automatically implements this in two ways:
It gives an optimal flow associated to a vector of rewards;
Filtering policies can take a vector of rewards as arguments and automatically discard the null edges of one optimal solution.
[56]:
rewards = [2, 1, 2, 1, 2]
diamond.optimize_rates(rewards)
[56]:
array([2. , 0. , 0.2, 0. , 1. ])
[57]:
diamond.run("longest", rewards=rewards, k=300, forbidden_edges=True)
[57]:
True
[58]:
diamond.show_flow()
[59]:
fig = diamond.simulator.show_ccdf()
[60]:
fig = diamond.simulator.show_average_queues(sort=True, as_time=True)
Fish#
The purpose of this example is to show a case where a family of greedy with priorities can asymptotically reach the vertices.
[61]:
fish = sm.KayakPaddle(
l=0, m=4, names=[str(i) for i in range(1, 7)], rates=[4, 4, 3, 2, 3, 2]
)
fish.show_graph()
Look at the vertices:
[62]:
for i in range(len(fish.vertices)):
fish.show_vertex(i, disp_rates=False)
Weighted matching#
Let us try to nullify the edge between 3 and 6 with adapted priorities. As this may be unstable, let us pick a large max queue.
[63]:
rewards = [0, 2, 2, 1, 0, 0, 1]
fish.run("priority", weights=rewards, n_steps=10000000, max_queue=1000000)
[63]:
True
[64]:
fish.show_flow(disp_rates=False)
Threshold-based weighting#
So we managed to almost nullify the edge at the price of making node 4 unstable (it cannot check the conservation law). This can be addressed by using a threshold above which the policy is altered.
[65]:
counterweights = [0, 1, 1, 2, 0, 0, 2]
[66]:
fish.run(
"priority",
weights=rewards,
n_steps=10000000,
threshold=500,
counterweights=counterweights,
)
[66]:
True
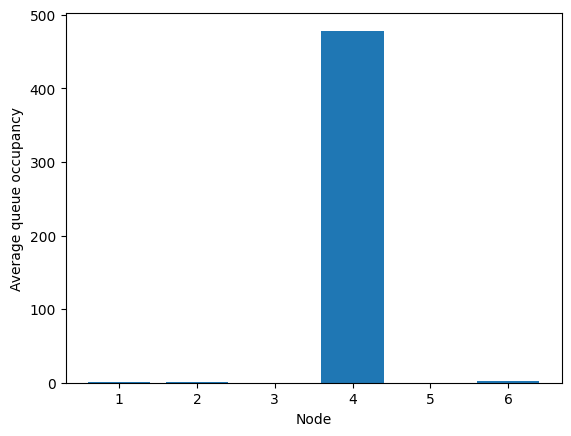
[67]:
fish.show_flow(disp_rates=False)
And that’s it! The threshold controls the trade-off between the size of queue 4 and the nullity of edge (3, 6).
[68]:
fig = fish.simulator.show_ccdf()
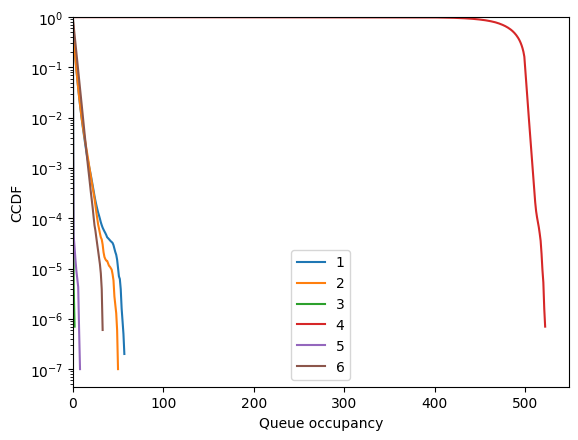
[69]:
fig = fish.simulator.show_average_queues()
[70]:
fish.run(
"priority",
weights=rewards,
n_steps=10000000,
threshold=10,
counterweights=counterweights,
)
[70]:
True
[71]:
fish.show_flow(disp_rates=False)
And that’s it! The threshold controls the trade-off between the size of queue 4 and the nullity of edge (3, 6).
[72]:
fig = fish.simulator.show_ccdf()
[73]:
fig = fish.simulator.show_average_queues()
Reward-based scoring#
Another possibility: use a reward-based greedy scoring.
[74]:
fish.run("longest", rewards=rewards, n_steps=10000000, beta=0.01, shift_rewards=True)
[74]:
True
[75]:
fish.show_flow(disp_rates=False)
[76]:
fig = fish.simulator.show_ccdf()
[77]:
fig = fish.simulator.show_average_queues()
[78]:
fish.run("longest", rewards=rewards, n_steps=10000000, beta=0.1, shift_rewards=True)
[78]:
True
[79]:
fish.show_flow(disp_rates=False)
[80]:
fig = fish.simulator.show_ccdf()
[81]:
fig = fish.simulator.show_average_queues()
And that’s it! Beta controls the trade-off between the size of queue 4 and the nullity of edge (3, 6).
Reaching a highly degenerated vertex#
The following model has very injective vertices.
[82]:
import numpy as np
codomino = sm.Codomino(rates=[2, 4, 2, 2, 4, 2])
codomino.base_flow = np.array([1.0, 1.0, 1.0, 2.0, 0.0, 1.0, 1.0, 1.0])
codomino.vertices
[82]:
[{'kernel_coordinates': array([-1., -1.]),
'edge_coordinates': array([0., 2., 0., 4., 0., 0., 2., 0.]),
'null_edges': [0, 2, 4, 5, 7],
'bijective': False},
{'kernel_coordinates': array([-1., 1.]),
'edge_coordinates': array([2., 0., 0., 2., 2., 0., 0., 2.]),
'null_edges': [1, 2, 5, 6],
'bijective': False},
{'kernel_coordinates': array([1., 1.]),
'edge_coordinates': array([2., 0., 2., 0., 0., 2., 0., 2.]),
'null_edges': [1, 3, 4, 6],
'bijective': False}]
In particular the first vertex is made of three unconnected pairs:
[83]:
codomino.show_vertex(0)
Pure filtering#
Let try to reach it with a filtering policy without threshold.
[84]:
codomino.run(
"longest",
forbidden_edges=codomino.vertices[0]["null_edges"],
n_steps=10000000,
max_queue=100000,
)
[84]:
True
[85]:
codomino.show_flow()
As this is pure filtering, the desired edges are indeed null.
[86]:
codomino.simulation
[86]:
array([0. , 1.9977536, 0. , 3.9996384, 0. , 0. ,
2.0006656, 0. ])
But performance is awful!
[87]:
fig = codomino.simulator.show_ccdf()
[88]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
\(k\)-filtering#
A softer solution in that case is to use a \(k\)-filtering policy (i.e. with threshold).
[89]:
codomino.run(
"longest",
forbidden_edges=codomino.vertices[0]["null_edges"],
k=900,
n_steps=10000000,
)
[89]:
True
[90]:
codomino.show_flow()
So this is stable with a limited matching rate on forbidden edges.
[91]:
codomino.simulation
[91]:
array([3.0672000e-03, 1.9972304e+00, 0.0000000e+00, 3.9954352e+00,
0.0000000e+00, 2.9280000e-03, 1.9968848e+00, 3.7328000e-03])
Performance is controlled by the threshold.
[92]:
fig = codomino.simulator.show_ccdf()
[93]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
[94]:
codomino.run(
"longest",
forbidden_edges=codomino.vertices[0]["null_edges"],
k=50,
n_steps=10000000,
)
[94]:
True
[95]:
codomino.show_flow()
[96]:
codomino.simulation
[96]:
array([0.0443776, 1.9524512, 0.0306336, 3.9258976, 0.0123232, 0.0332736,
1.9575072, 0.0435152])
[97]:
fig = codomino.simulator.show_ccdf()
[98]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
Other filtering policies exists to reach the vertex.
\(\epsilon\)-filtering#
[99]:
codomino.run(
"e_filtering",
forbidden_edges=codomino.vertices[0]["null_edges"],
epsilon=0.01,
n_steps=10000000,
)
[99]:
True
[100]:
codomino.show_flow()
[101]:
codomino.simulation
[101]:
array([0.027568 , 1.9696768, 0.0203312, 3.9526368, 0.0098112, 0.0194064,
1.9728544, 0.0276576])
[102]:
fig = codomino.simulator.show_ccdf()
[103]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
[104]:
rewards = [1 * (i not in codomino.vertices[0]["null_edges"]) for i in range(8)]
rewards
[104]:
[0, 1, 0, 1, 0, 0, 1, 0]
Extended-Gradient Primal-Dual (EGPD)#
[105]:
codomino.run("virtual_queue", rewards=rewards, beta=0.01, n_steps=10000000)
[105]:
True
[106]:
codomino.show_flow()
[107]:
codomino.simulation
[107]:
array([8.2896000e-03, 1.9915008e+00, 5.9280000e-03, 3.9822880e+00,
3.2800000e-03, 9.3072000e-03, 1.9884384e+00, 1.0620800e-02])
[108]:
fig = codomino.simulator.show_ccdf()
[109]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
Constant-Regret Primal-Dual (CRPD)#
[110]:
from numba import njit
v = njit(lambda t: (t+1)**.2)
codomino.run("constant_regret", rewards=rewards, fading=v, n_steps=10000000)
[110]:
True
[111]:
codomino.show_flow()
[112]:
codomino.simulation
[112]:
array([0.0537568, 1.9464192, 0.035488 , 3.9115984, 0.017136 , 0.0385824,
1.9464 , 0.0505264])
[113]:
fig = codomino.simulator.show_ccdf()
[114]:
fig = codomino.simulator.show_average_queues(sort=True, as_time=True)
Running multiple simulations#
The methods exposed above are for the analysis of a single model.
Simulations can be also be batched to quickly build a serie of experiments. Key ingredients:
Iterator: builds a variable parameter.XP: builds a serie of simulation to run.evaluate: run simulations and extract metrics out of it.
(see the reference section for details)
Below are two toy examples.
Measuring the delay of a fobidden-edge policy on a injective-only vertex#
[115]:
from stochastic_matching import XP, Iterator, evaluate
from multiprocess import Pool
For most scenarios, one single long simulation is enough. However, what we measure here is related to a unbiased random walk, so we will build a redundant iterator.
[116]:
xp = XP(name='RW', simulator='longest', model=sm.CycleChain(),
iterator=Iterator('n_steps', [2**t for t in range(10, 21) for _ in range(1000)], name='T'),
forbidden_edges=True, rewards=[0, 1, 1, 1, 0])
[117]:
with Pool() as p:
res = evaluate(xp, ["delay"], p)
Let’s gather everything.
[118]:
from collections import defaultdict
metrics = defaultdict(list)
for t, d in zip(res['RW']['T'], res['RW']['delay']):
metrics[t].append(d)
for k, v in metrics.items():
metrics[k] = np.average(v)
steps = [k for k in metrics]
delay = [v for v in metrics.values()]
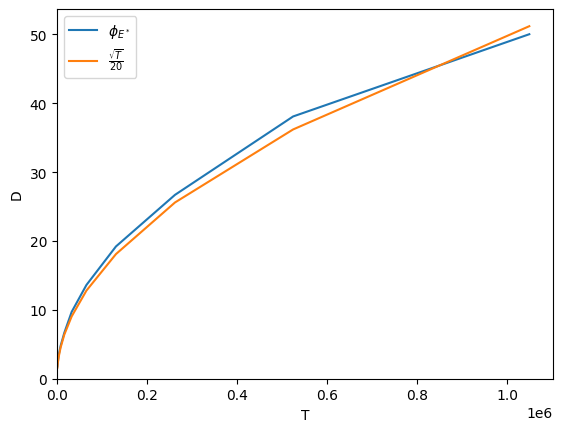
And plot!
[119]:
from matplotlib import pyplot as plt
plt.plot(steps, delay, label='$\\phi_{E^*}$')
plt.plot(steps, [np.sqrt(t)/20 for t in steps], label='$\\frac{\\sqrt{T}}{20}$')
plt.xlim([0, None])
plt.ylim([0, None])
plt.xlabel('T')
plt.ylabel('D')
plt.legend()
plt.show()
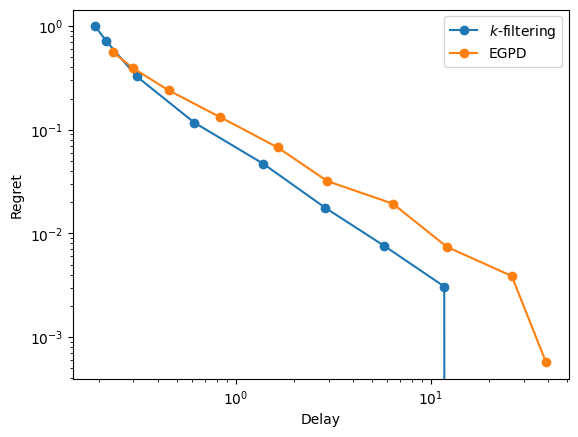
Comparing delay/regret trade-off for two policies#
[120]:
xp = XP(name='$k$-filtering', simulator='longest', model=sm.CycleChain(),
iterator=Iterator('k', [2**t for t in range(10)]),
forbidden_edges=True, rewards=[1, 1, 1, 1, 0])
xp += XP(name='EGPD', simulator='virtual_queue', model=sm.CycleChain(),
iterator=Iterator('beta', [2**(-t) for t in range(10)]),
rewards=[1, 1, 1, 1, 0])
[121]:
with Pool() as p:
res = evaluate(xp, ["delay", "regret"], p)
[122]:
for policy, metrics in res.items():
plt.loglog(metrics['delay'], metrics['regret'], marker='o', label=policy)
plt.xlabel('Delay')
plt.ylabel('Regret')
plt.legend()
plt.show()